저자: Yushi Wang, Changsheng Luo, Penghui Chen, Jianran Liu, Weijian Sun, Tong Guo, Kechang Yang, Biao Hu, Yangang Zhang, Mingguo Zhao | 날짜: 2025-11-06 | DOI: 10.48550/arXiv.2511.03996 📄 PDF
Essence
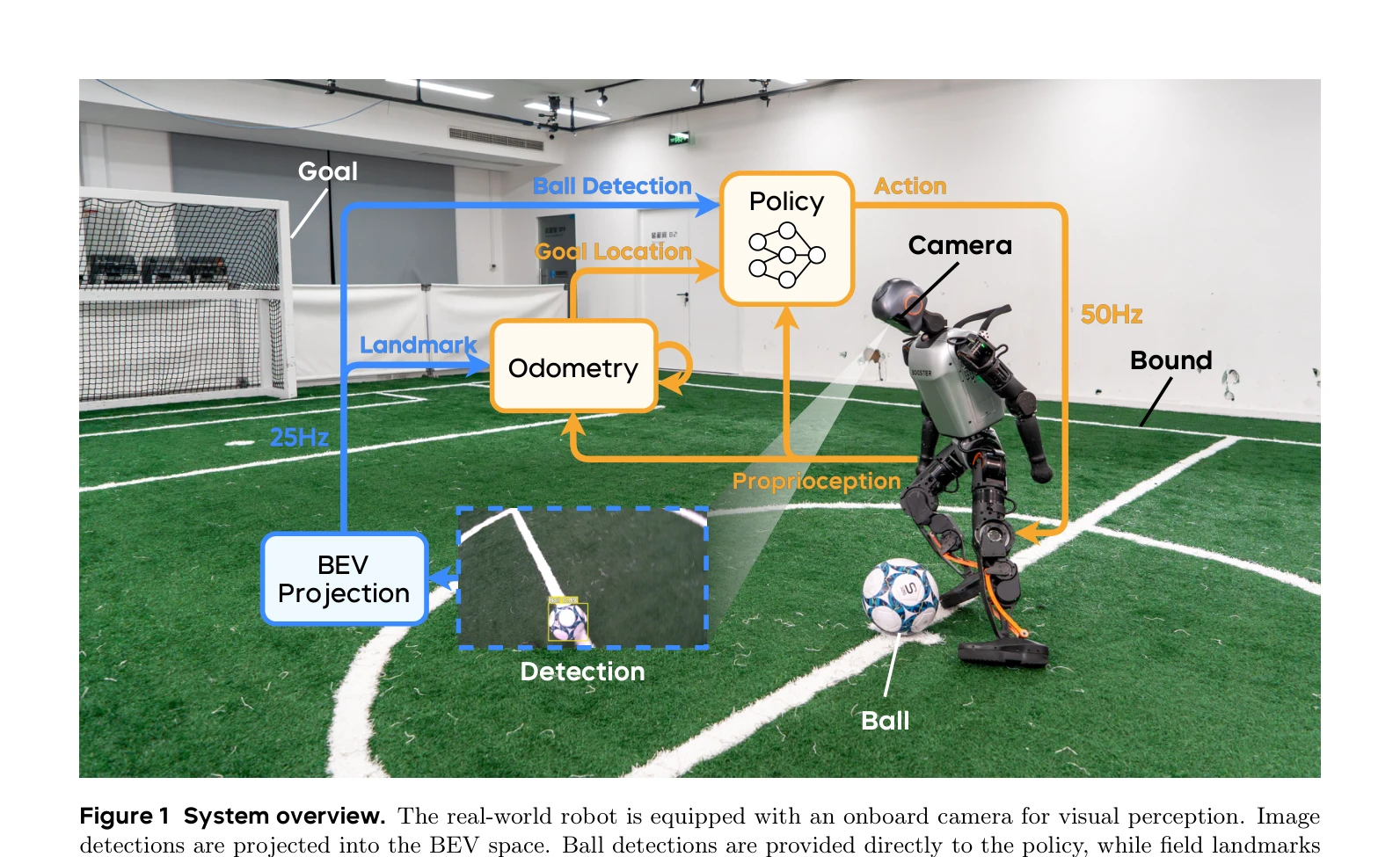
Figure 1 System overview. The real-world robot is equipped with an onboard camera for visual perception. Image
본 논문은 시각 인식과 모션 제어를 직접 통합한 통합 강화학습 기반 컨트롤러를 통해 인형 로봇이 반응형 축구 기술을 습득할 수 있도록 하는 방법을 제시한다. Adversarial Motion Priors를 시각 기반 동적 제어 환경으로 확장하여 실제 RoboCup 경기에서 강력한 반응성을 보여준다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 Adversarial Motion Priors를 시각 기반 동적 제어로 성공적으로 확장하여, 강화학습 기반 인형 로봇이 실세계 축구 환경에서 반응형 행동을 자동으로 습득할 수 있음을 처음으로 입증했다. RoboCup 2025 우승이라는 실제 경쟁 성과는 제시된 방법론의 실용성과 견고성을 강력하게 검증한다.
