저자: Jean Pierre Sleiman, He Li, Alphonsus Adu-Bredu, Robin Deits, Arun Kumar, Kevin Bergamin, Mohak Bhardwaj, Scott Biddlestone, Nicola Burger, Matthew A. Estrada, Francesco Iacobelli, Twan Koolen, Alexander Lambert, Erica Lin, M. Eva Mungai, Zach Nobles, Shane Rozen-Levy, Yuyao Shi, Jiashun Wang, Jakob Welner, Fangzhou Yu, Mike Zhang, Alfred Rizzi, Jessica Hodgins, Sylvain Bertrand, Yeuhi Abe, Scott Kuindersma, Farbod Farshidian | 날짜: 2026-01-30 | DOI: 10.48550/arXiv.2602.00401 📄 PDF
Essence
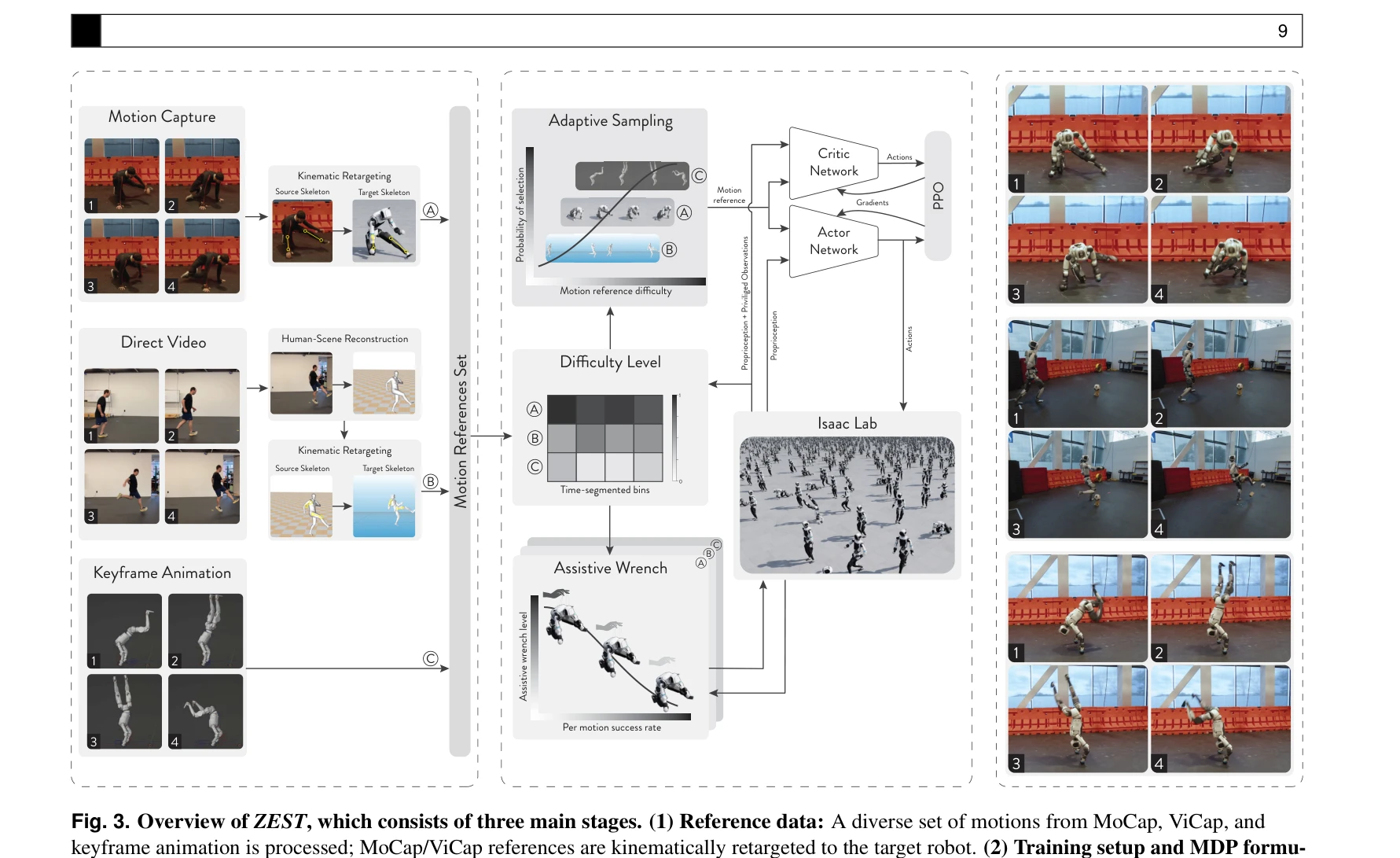
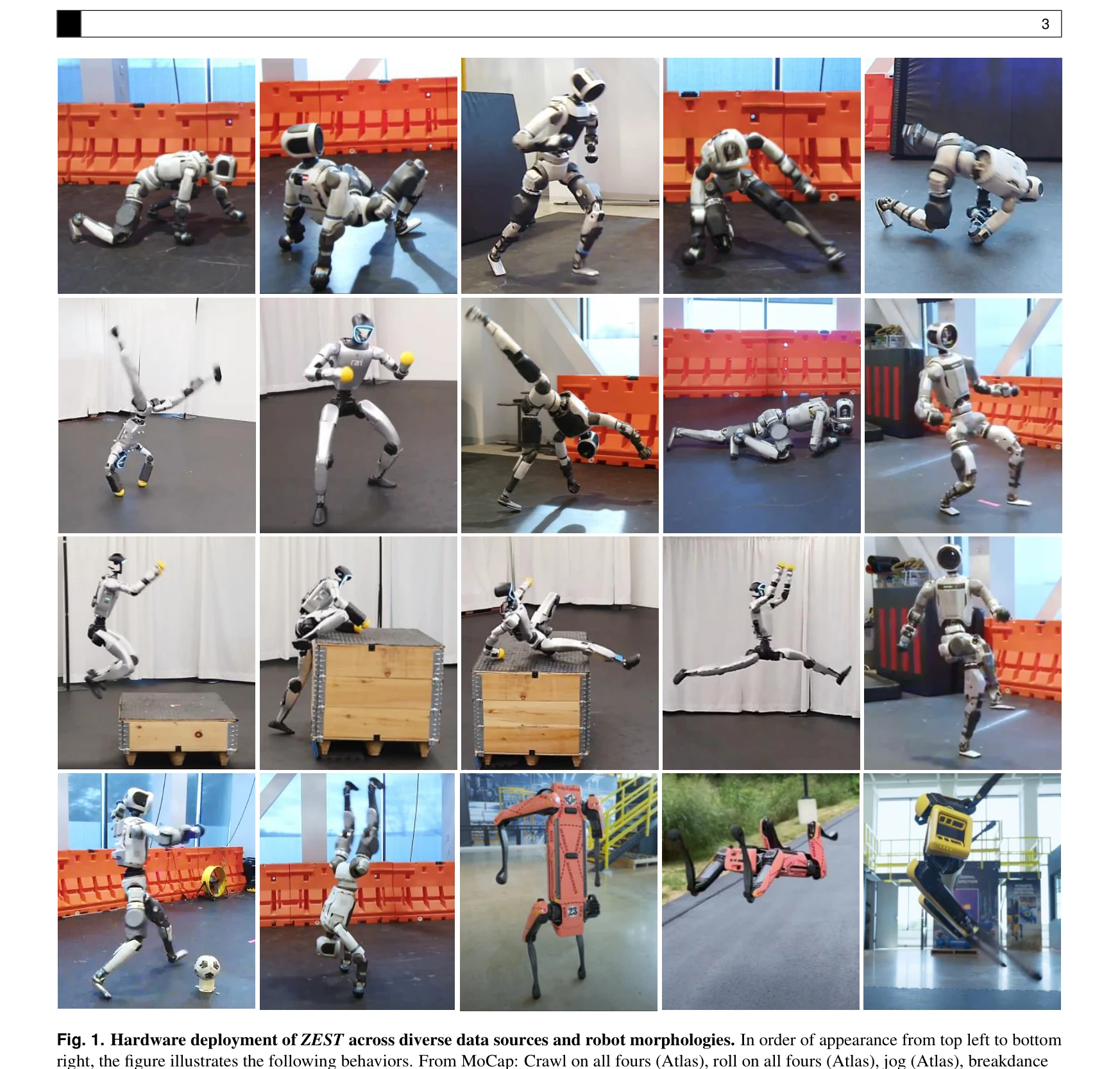
Fig. 3. Overview of ZEST, which consists of three main stages. (1) Reference data: A diverse set of motions from MoCap,
ZEST는 모션 캡처, 비디오, 애니메이션 등 다양한 출처의 데이터로부터 RL을 통해 인간형 로봇 제어 정책을 학습하고, 시뮬레이션에서만 훈련하여 하드웨어에 Zero-shot 배포하는 motion-imitation 프레임워크이다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: ZEST는 다양한 비정형 데이터 소스로부터 인간형 로봇의 일반적 제어 정책을 학습하고 zero-shot 배포하는 혁신적 프레임워크로, 실제 하드웨어에서의 광범위한 성공적 검증을 통해 로봇 제어의 실용성과 확장성을 크게 향상시킨 매우 중요한 기여이다.