Essence

Figure 1: Deployment to outdoor environments. We deploy our model to a number of outdoor
Causal transformer 기반의 학습 정책을 대규모 모델프리 강화학습으로 시뮬레이션에서 훈련하고 실제 휴머노이드 로봇에 제로샷으로 배포하여 다양한 실외 환경에서 안정적인 보행을 달성했다.
저자: Ilija Radosavovic, Tete Xiao, Bike Zhang, Trevor Darrell, Jitendra Malik, Koushil Sreenath | 날짜: 2023-03-06 | URL: https://arxiv.org/abs/2303.03381 📄 PDF
Figure 1: Deployment to outdoor environments. We deploy our model to a number of outdoor
Causal transformer 기반의 학습 정책을 대규모 모델프리 강화학습으로 시뮬레이션에서 훈련하고 실제 휴머노이드 로봇에 제로샷으로 배포하여 다양한 실외 환경에서 안정적인 보행을 달성했다.
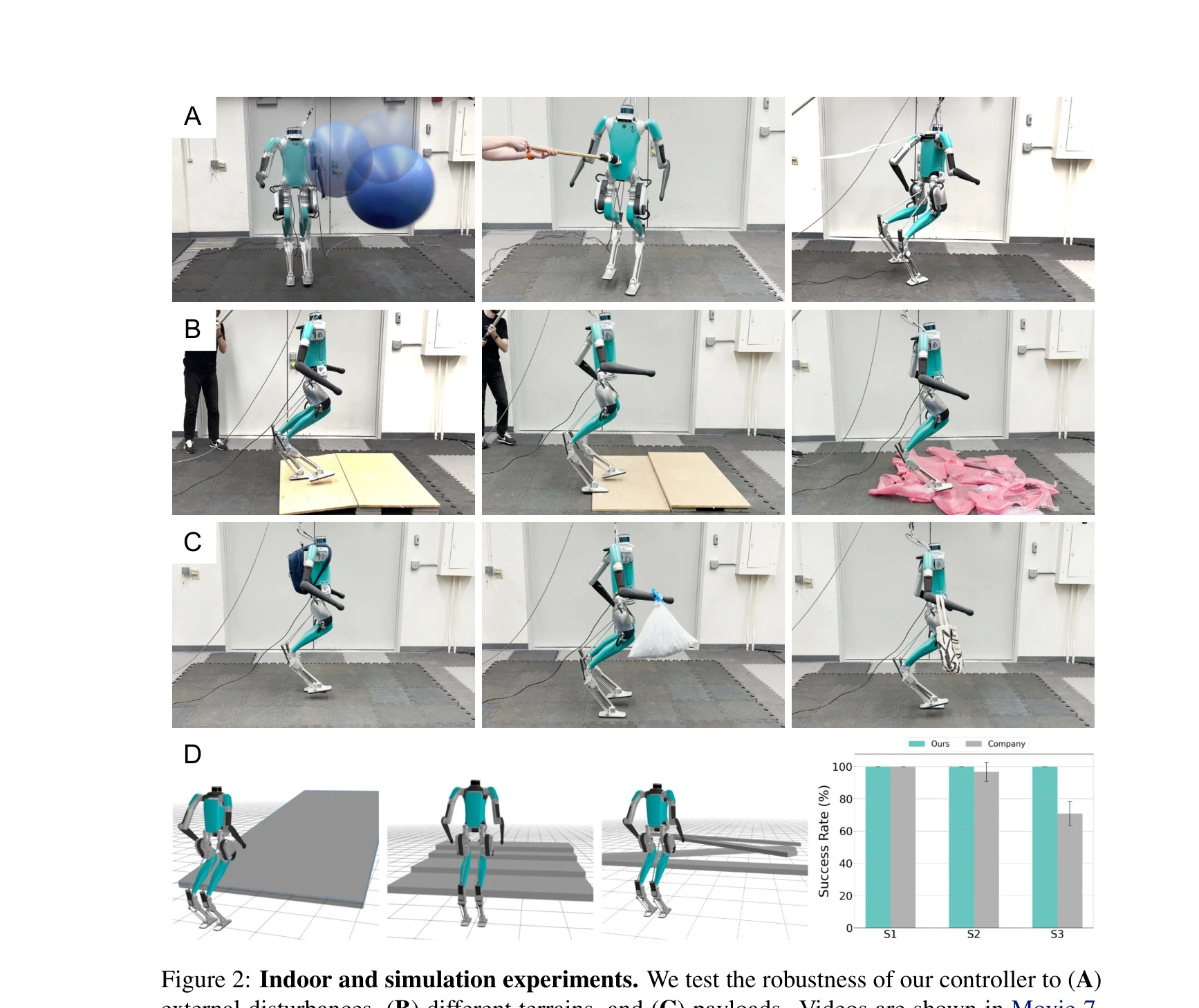
Figure 2: Indoor and simulation experiments. We test the robustness of our controller to (A)
총평: Causal transformer 기반의 강화학습 정책을 실제 humanoid 로봇에 성공적으로 배포한 중요한 사례로, 학습 기반 제어의 실용성과 일반화 능력을 보여준다. 아키텍처 선택에 대한 체계적 검증과 다양한 실세계 환경에서의 광범위한 실험을 통해 높은 기술적·실용적 가치를 제시한다.