Essence
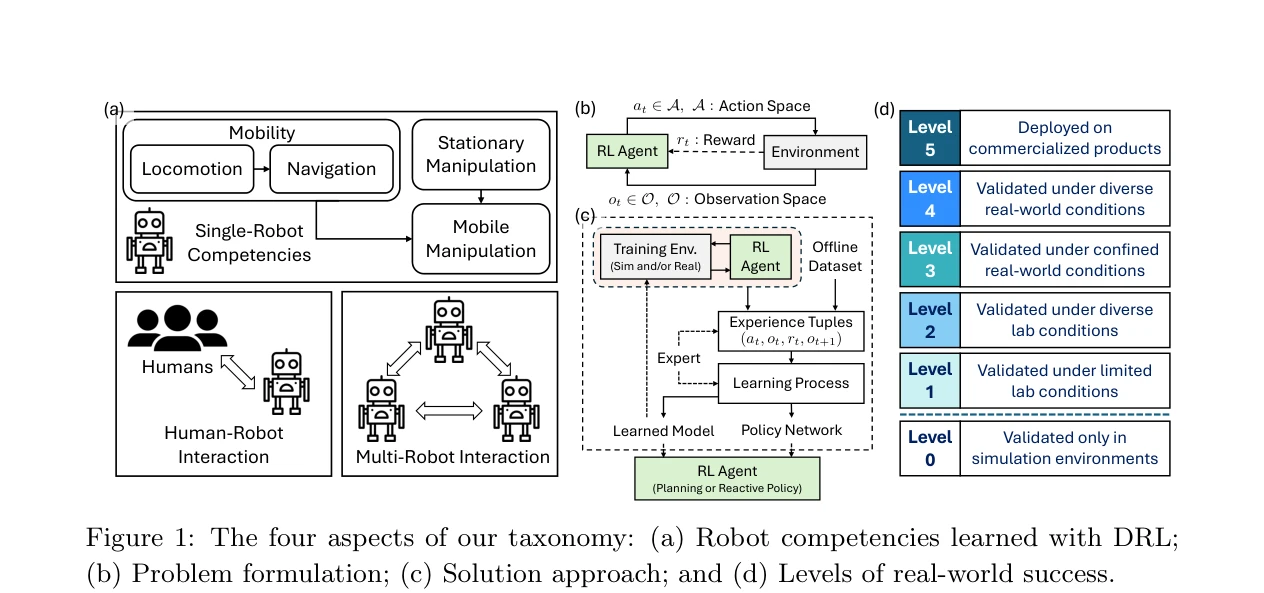
Figure 1: The four aspects of our taxonomy: (a) Robot competencies learned with DRL;
본 논문은 로봇 공학에서의 실제 성공 사례들을 중심으로 Deep Reinforcement Learning(DRL)의 현황을 종합적으로 조사하며, 로봇 역량, 문제 공식화, 해결 방법, 실세계 성공 수준의 네 가지 축으로 이루어진 새로운 분류 체계를 제시한다.
저자: Chen Tang, Ben Abbatematteo, Jiaheng Hu, Rohan Chandra, Roberto Martín-Martín, Peter Stone | 날짜: 2024-08-07 | URL: https://arxiv.org/abs/2408.03539 📄 PDF
Figure 1: The four aspects of our taxonomy: (a) Robot competencies learned with DRL;
본 논문은 로봇 공학에서의 실제 성공 사례들을 중심으로 Deep Reinforcement Learning(DRL)의 현황을 종합적으로 조사하며, 로봇 역량, 문제 공식화, 해결 방법, 실세계 성공 수준의 네 가지 축으로 이루어진 새로운 분류 체계를 제시한다.
Figure 1: The four aspects of our taxonomy: (a) Robot competencies learned with DRL;
Figure 1: The four aspects of our taxonomy: (a) Robot competencies learned with DRL;
총평: 본 논문은 DRL이 로봇 공학에서 달성한 실제 성공과 한계를 명확하고 체계적으로 분석하는 현대적 설문으로, 네 가지 축의 분류 체계는 필드의 현황을 이해하고 향후 연구 방향을 수립하는 데 유용한 프레임워크를 제공한다. 특히 실세계 배포 수준의 정량화는 기존 설문과의 차별성 있는 기여이며, RL 실무자와 로봇 공학자 모두에게 가치 있는 참고 자료가 될 수 있다.