How
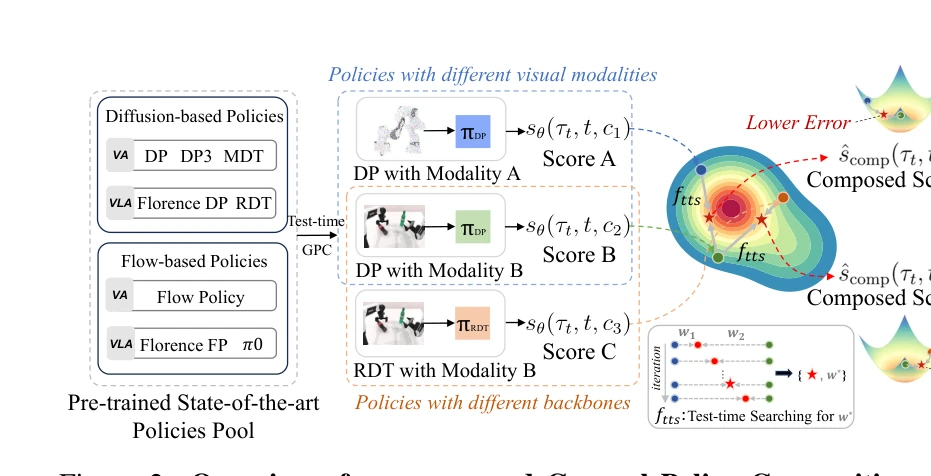
Figure 2: Overview of our proposed General Policy Composition. Combining distributional
- 분자 가중치(w₁, w₂, ..., wₙ)에 대한 convex 조합을 통해 여러 정책의 score 함수 조합: s_composed = Σ wᵢ · s_θᵢ
- Test-time에 validation 데이터 또는 작은 샘플 집합에서 다양한 가중치 조합을 탐색하여 최적 w* 선택
- Langevin dynamics 기반 denoising 과정에서 조합된 score를 사용하여 action 생성
- Diffusion Policy, DP3, MDT, RDT, Flow Policy 등 다양한 정책 아키텍처 및 시각 모드(Florence, 포인트 클라우드 등)에 호환 가능하도록 설계