Essence
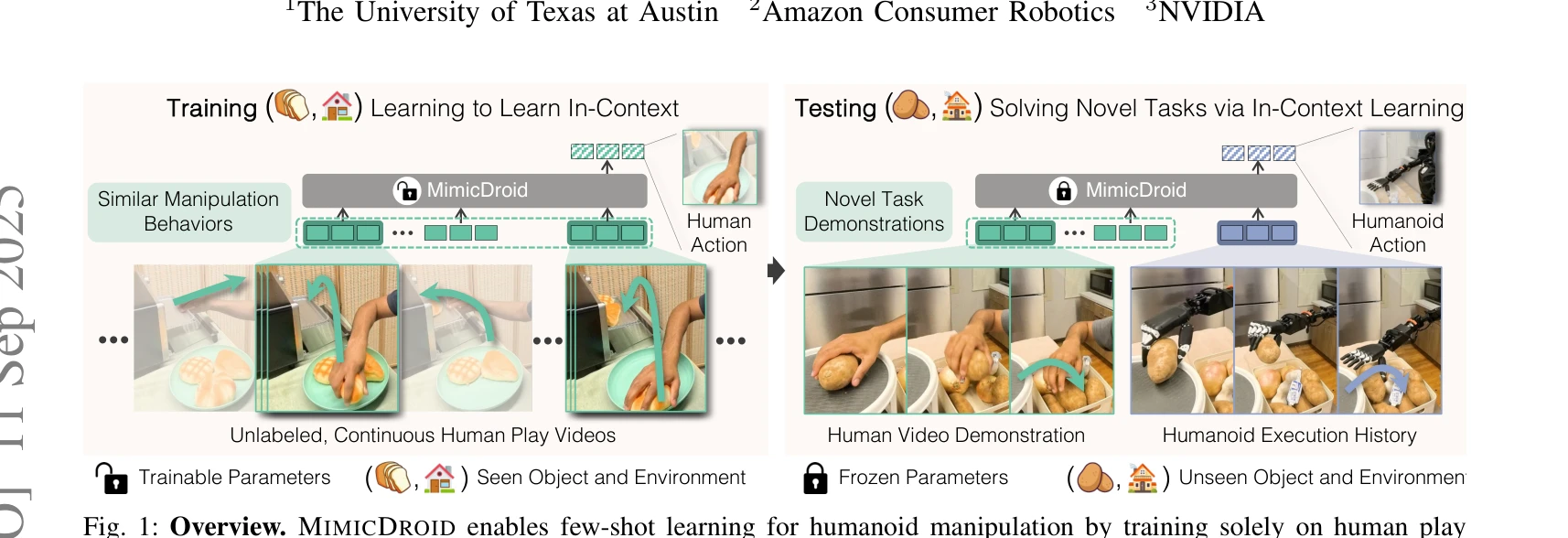
Fig. 1: Overview. MIMICDROID enables few-shot learning for humanoid manipulation by training solely on human play
MimicDroid는 인간의 자유로운 상호작용 비디오(human play videos)만을 학습 데이터로 사용하여 휴머노이드 로봇이 In-Context Learning(ICL)을 통해 새로운 조작 작업을 효율적으로 수행하도록 한다.