Essence
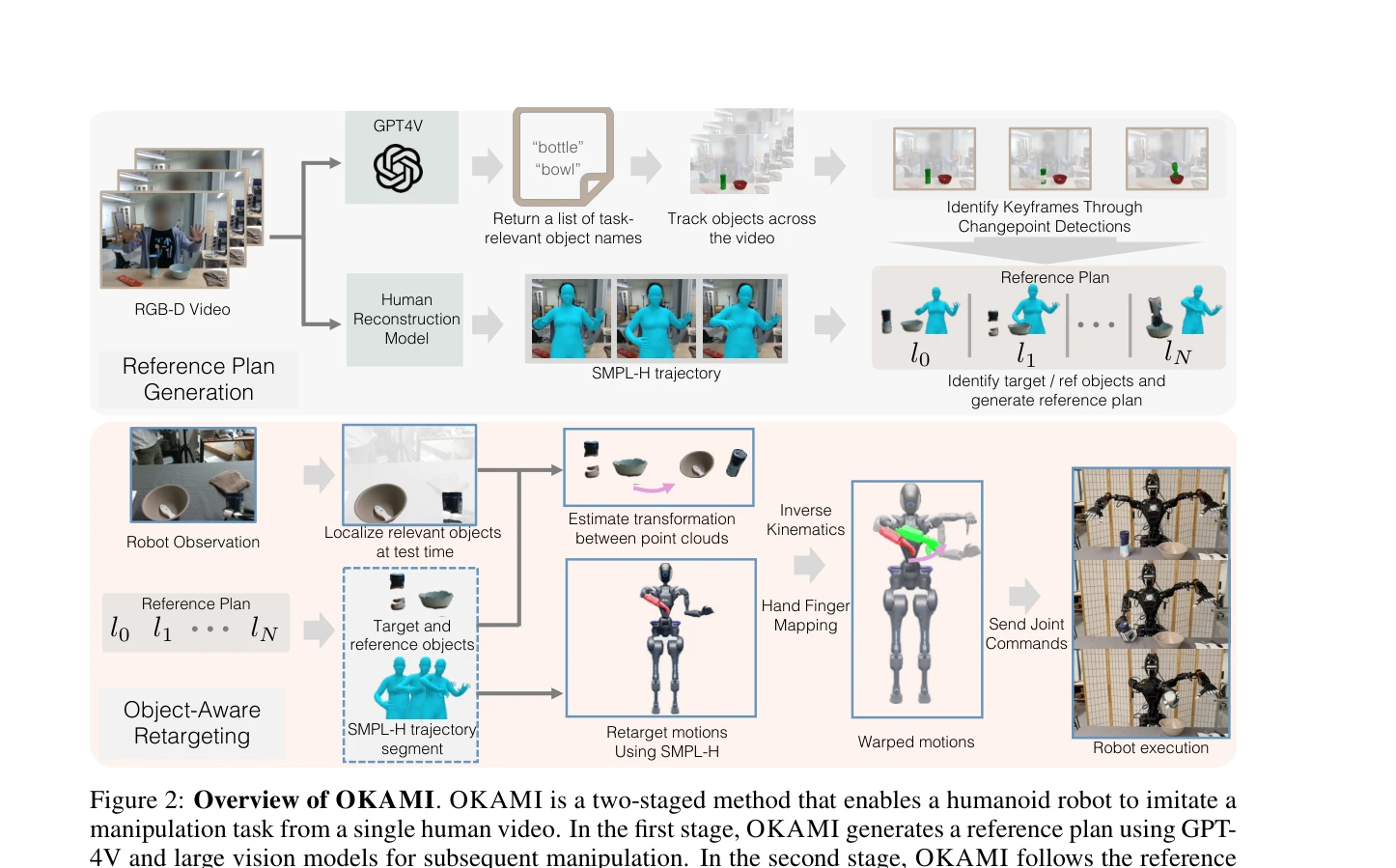
Figure 2: Overview of OKAMI. OKAMI is a two-staged method that enables a humanoid robot to imitate a
OKAMI는 단일 RGB-D 비디오 시연으로부터 인형 로봇의 조작 기술을 학습하도록 하는 방법으로, object-aware retargeting을 통해 인간의 움직임을 로봇 기구학에 맞게 변환하면서 테스트 시 객체 위치에 적응한다.
저자: Jinhan Li, Yifeng Zhu, Yuqi Xie, Zhenyu Jiang, Mingyo Seo, Georgios Pavlakos, Yuke Zhu | 날짜: 2024-10-15 | URL: https://arxiv.org/abs/2410.11792 📄 PDF
Figure 2: Overview of OKAMI. OKAMI is a two-staged method that enables a humanoid robot to imitate a
OKAMI는 단일 RGB-D 비디오 시연으로부터 인형 로봇의 조작 기술을 학습하도록 하는 방법으로, object-aware retargeting을 통해 인간의 움직임을 로봇 기구학에 맞게 변환하면서 테스트 시 객체 위치에 적응한다.
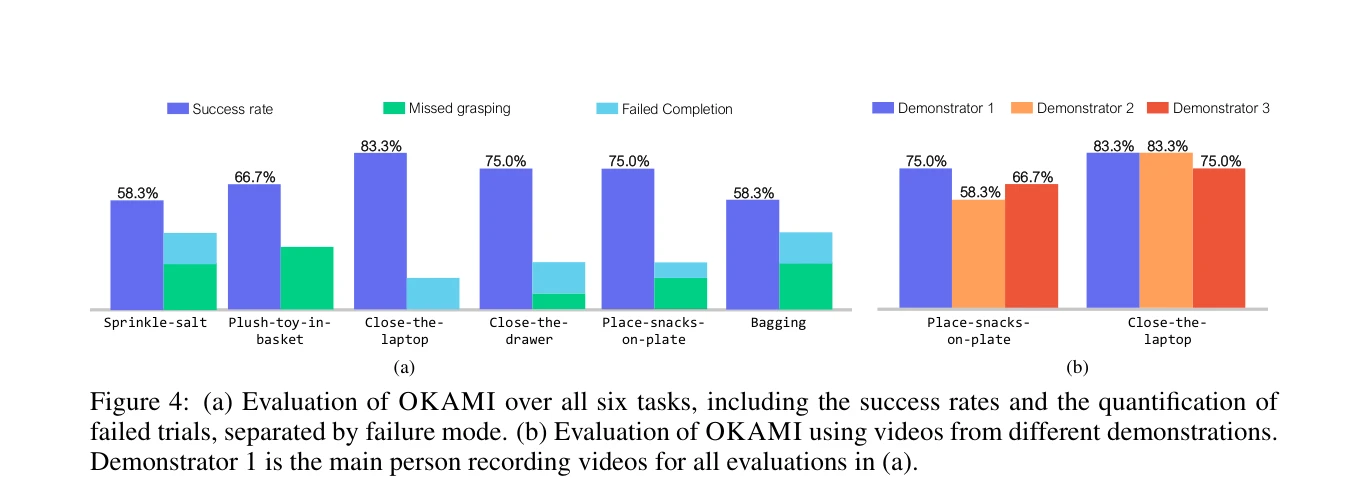
Figure 4: (a) Evaluation of OKAMI over all six tasks, including the success rates and the quantification of
Figure 2: Overview of OKAMI. OKAMI is a two-staged method that enables a humanoid robot to imitate a
총평: OKAMI는 object-aware retargeting이라는 핵심 개념으로 단일 비디오로부터 인형 로봇의 조작 학습을 효과적으로 해결하며, 실제 하드웨어에서 강한 일반화 능력을 입증하여 로봇 학습의 실용성을 크게 향상시킨다.