Essence
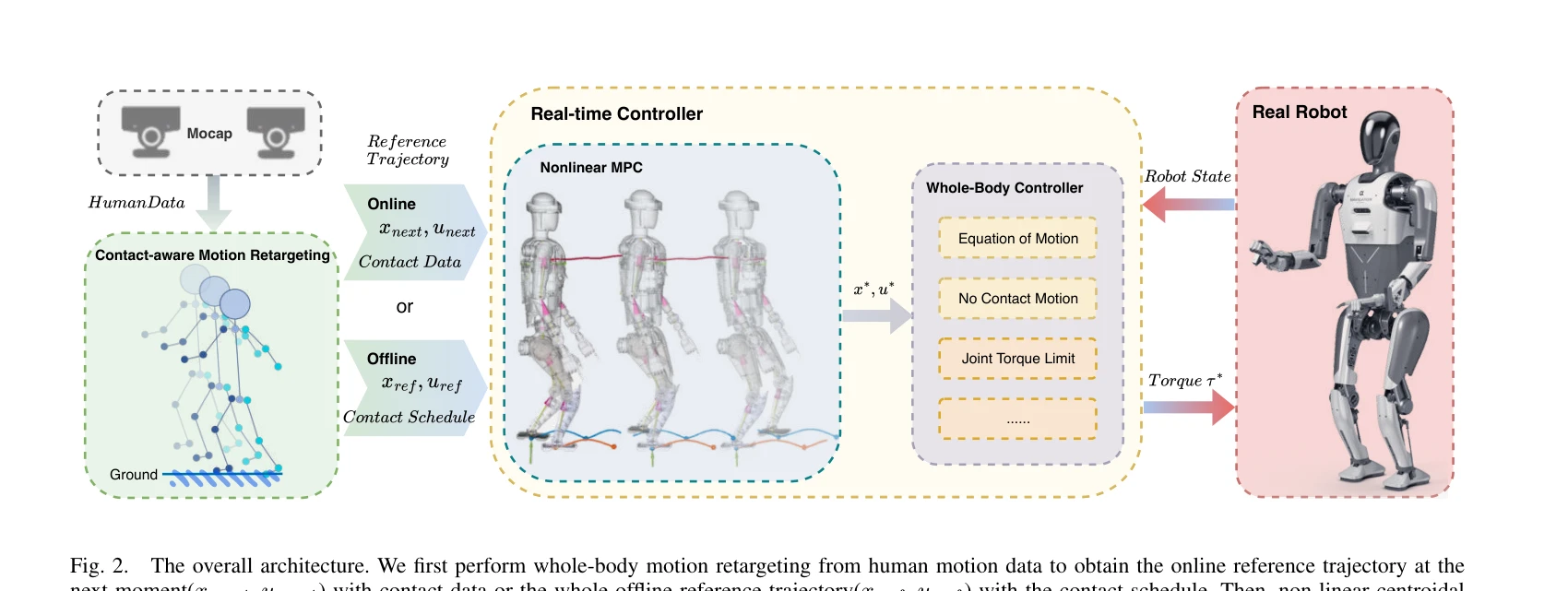
Fig. 2.
전신 동작 모방을 위해 contact-aware 전신 모션 리타겟팅과 비선형 중심 MPC를 결합한 휴머노이드 로봇 제어 프레임워크를 제안한다. 실제 휴머노이드 로봇에서 인간의 다양한 전신 동작을 정확하고 안정적으로 모방할 수 있음을 입증한다.
저자: Zhenghan Chen, Haodong Zhang, Dongqi Wang, Jiyu Yu, Haocheng Xu, Yue Wang, Rong Xiong | 날짜: 2025-08-01 | URL: https://arxiv.org/abs/2508.00362 📄 PDF
Fig. 2.
전신 동작 모방을 위해 contact-aware 전신 모션 리타겟팅과 비선형 중심 MPC를 결합한 휴머노이드 로봇 제어 프레임워크를 제안한다. 실제 휴머노이드 로봇에서 인간의 다양한 전신 동작을 정확하고 안정적으로 모방할 수 있음을 입증한다.
Fig. 2.
Fig. 2.
총평: Contact-aware motion retargeting과 nonlinear centroidal MPC를 체계적으로 결합하여 실제 휴머노이드 로봇에서 정확하고 안정적인 전신 모션 모방을 달성한 강력한 연구이다. 실제 로봇 플랫폼에서의 광범위한 검증은 실용적 가치를 높이나, 고속 동작 확장 및 강건성 분석에서 추가 개선이 필요하다.