Essence
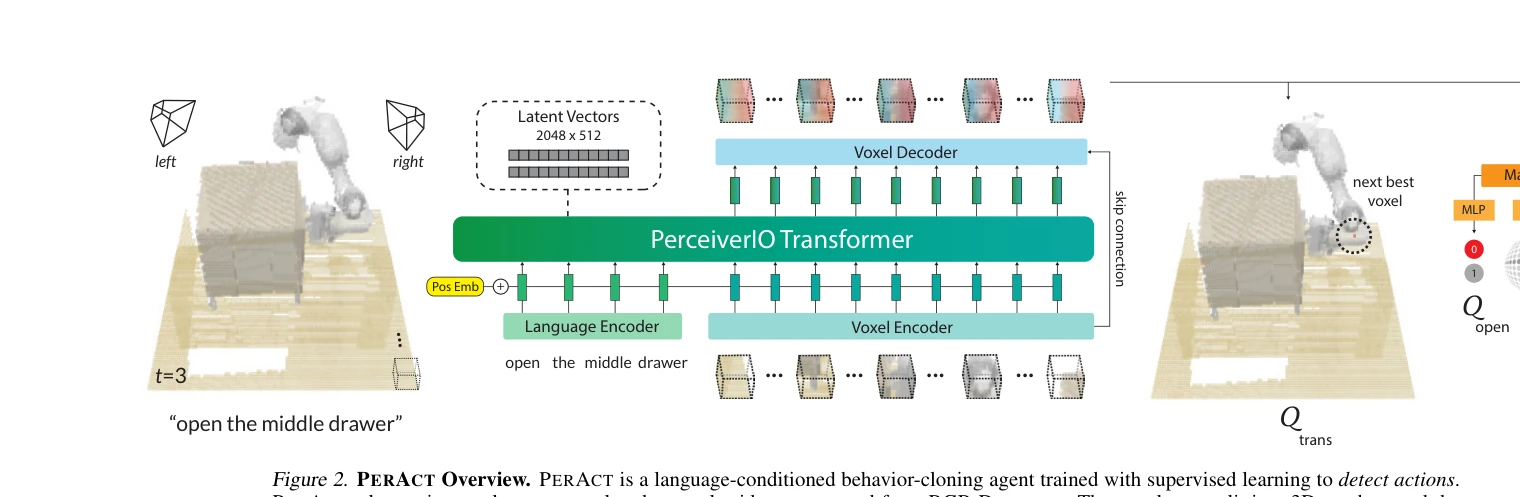
Figure 2. PERACT Overview. PERACT is a language-conditioned behavior-cloning agent trained with supervised learning to d
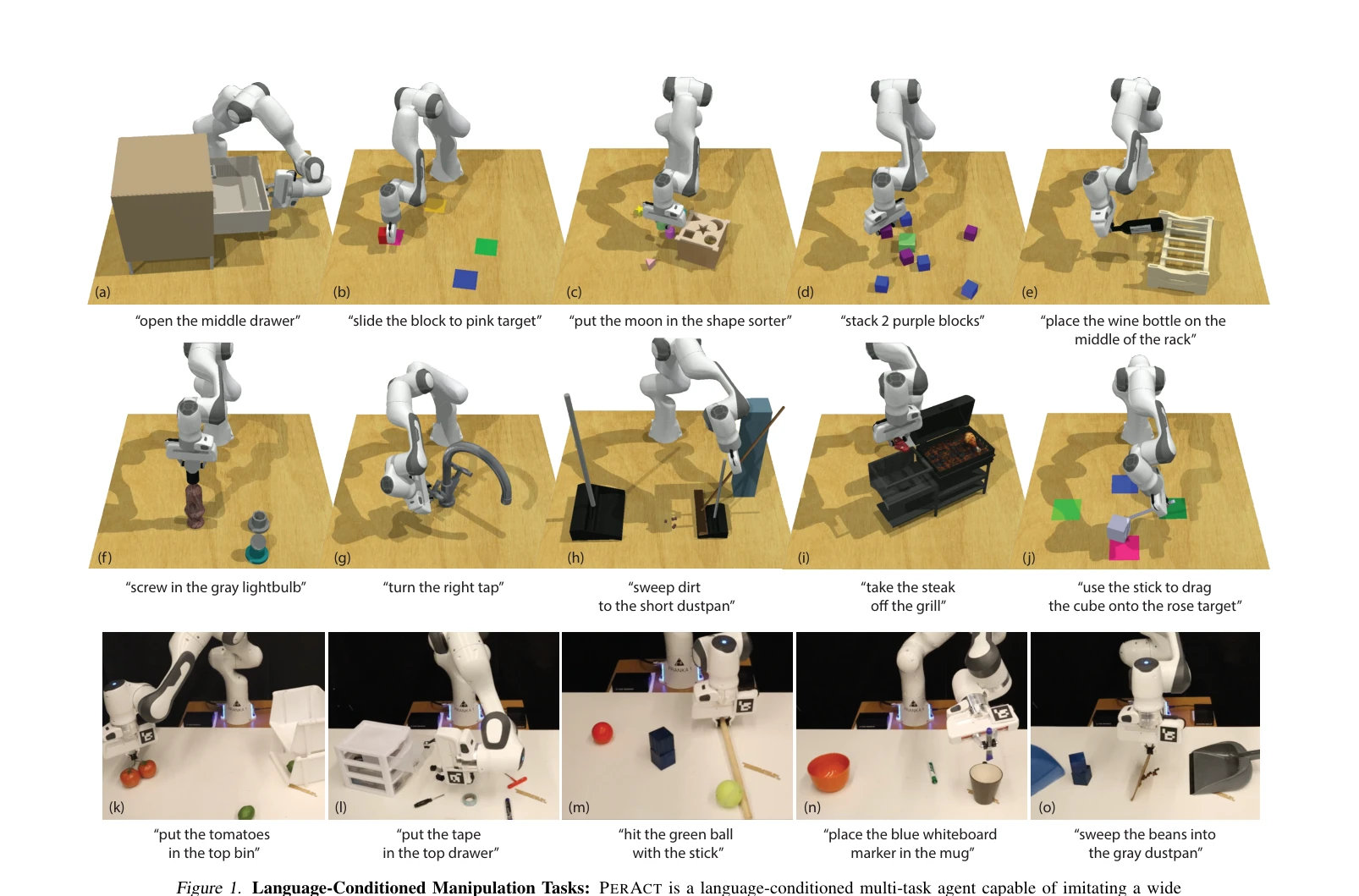
본 논문은 Perceiver Transformer를 사용하여 voxelized 3D 관찰과 이산화된 행동으로 6-DoF 로봇 조작을 수행하는 언어 조건화 행동 복제 에이전트 PerAct를 제안한다. 이 formulation은 2D 이미지 기반 접근법보다 훨씬 효율적이고 강력한 구조적 prior를 제공한다.