Essence
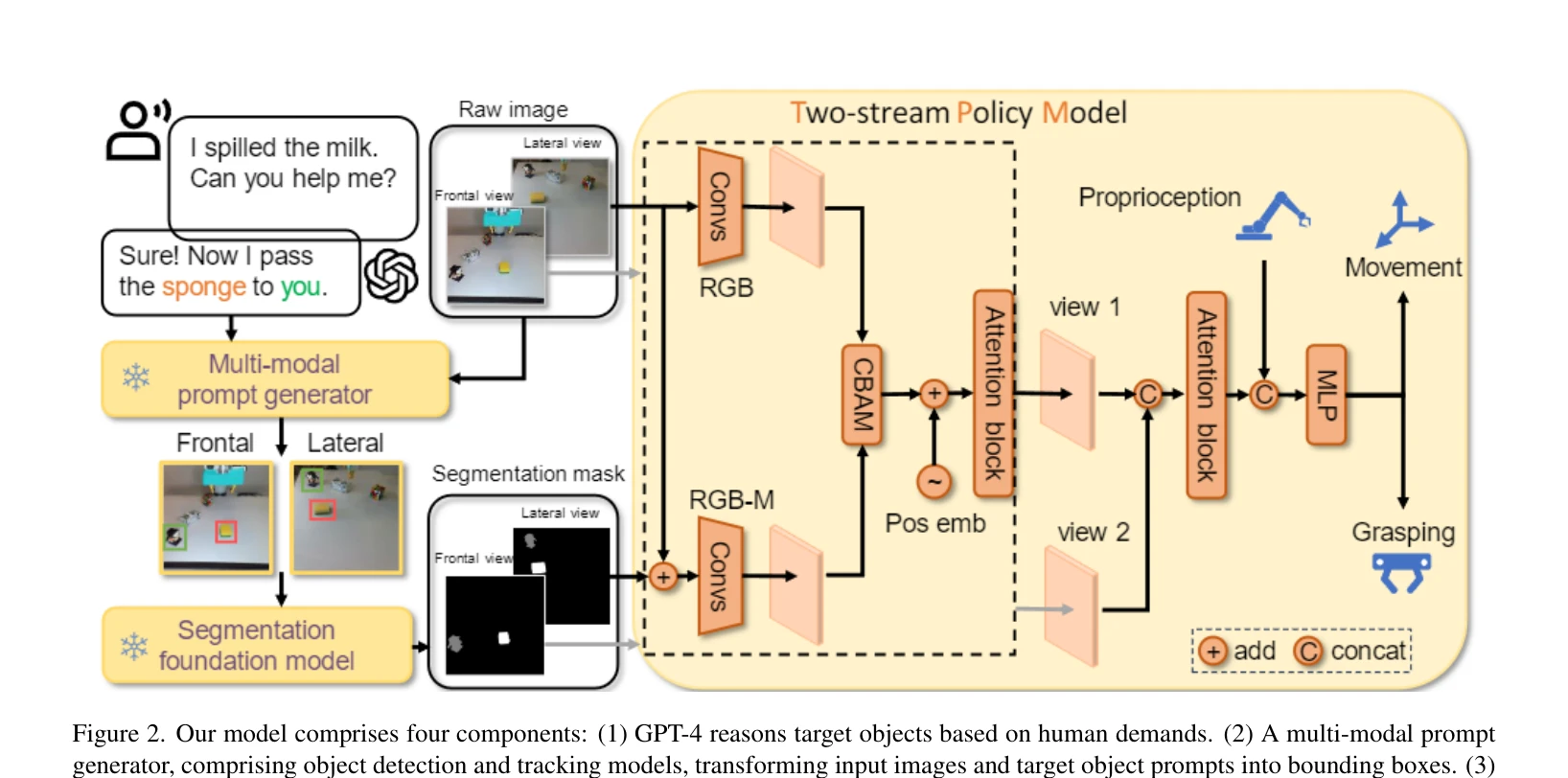
Figure 2. Our model comprises four components: (1) GPT-4 reasons target objects based on human demands. (2) A multi-moda
인터넷 규모의 기초 모델(foundation models)에서 생성된 언어-추론 기반 분할 마스크를 활용하여 로봇 조작 작업을 조건화함으로써 샘플 효율적인 일반화를 달성하는 패러다임을 제안한다.
저자: Jiange Yang, Wenhui Tan, Chuhao Jin, Keling Yao, Bei Liu, Jianlong Fu, Ruihua Song, Gangshan Wu, Limin Wang | 날짜: 2023-06-09 | URL: https://arxiv.org/abs/2306.05716 📄 PDF
Figure 2. Our model comprises four components: (1) GPT-4 reasons target objects based on human demands. (2) A multi-moda
인터넷 규모의 기초 모델(foundation models)에서 생성된 언어-추론 기반 분할 마스크를 활용하여 로봇 조작 작업을 조건화함으로써 샘플 효율적인 일반화를 달성하는 패러다임을 제안한다.
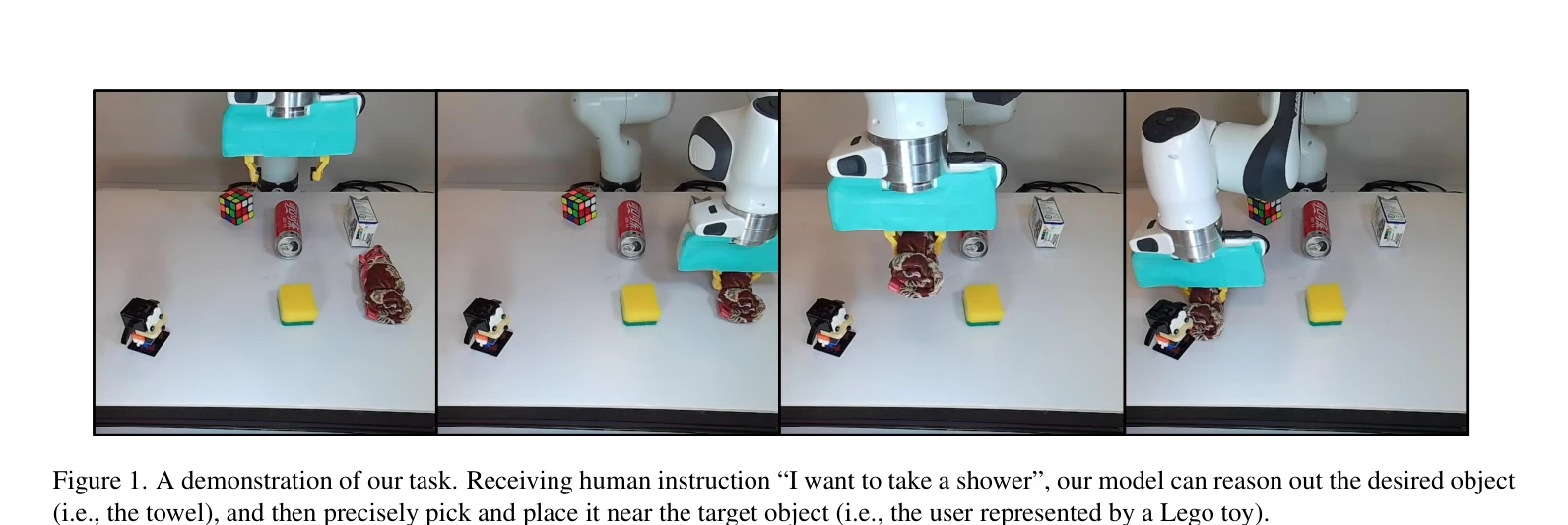
Figure 1. A demonstration of our task. Receiving human instruction “I want to take a shower”, our model can reason out t
Figure 2. Our model comprises four components: (1) GPT-4 reasons target objects based on human demands. (2) A multi-moda
총평: 기초 모델의 지식을 체계적으로 로봇 조작에 통합하는 실질적인 패러다임을 제시하였으며, 언어-추론 마스크라는 새로운 조건화 모달리티와 two-stream 정책 모델로 샘플 효율적 일반화를 달성한 의미 있는 기여를 했다.